Animal Intrusion Detection System Using AIOT
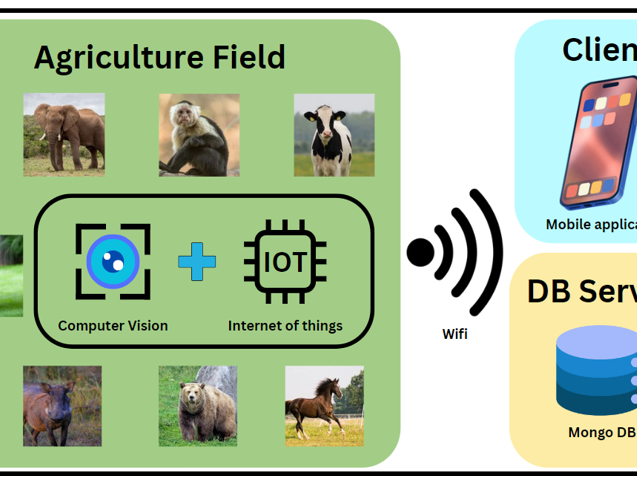
This study introduces an AIoT-based Animal Intrusion Detection System designed to address human-wildlife conflicts in Bhutan’s agricultural sector. The system leverages the YOLOv8 model integrated with IoT technology to detect and classify wildlife intrusions in real-time, sending notification alerts to farmers via a mobile application. The model was trained on 30,800 images of seven animal species commonly responsible for crop damage, achieving an accuracy of 95.7% during testing in a controlled lab environment. Key components of the system include a Raspberry Pi4, a camera, and ultrasonic sensors. The system shows significant potential to reduce crop losses, enhance food security, and improve rural livelihoods. However, its current limitations include a narrow dataset focused on a limited number of animal species and the lack of field testing under diverse conditions. Future improvements should prioritize expanding the dataset, refining the AI model, and conducting extensive field trials to optimize performance. This approach offers a promising solution to mitigate crop damage and support Bhutan’s predominantly agricultural communities.
Design of Hexapod Robot Using Inverse Kinematics for Educational Purpose
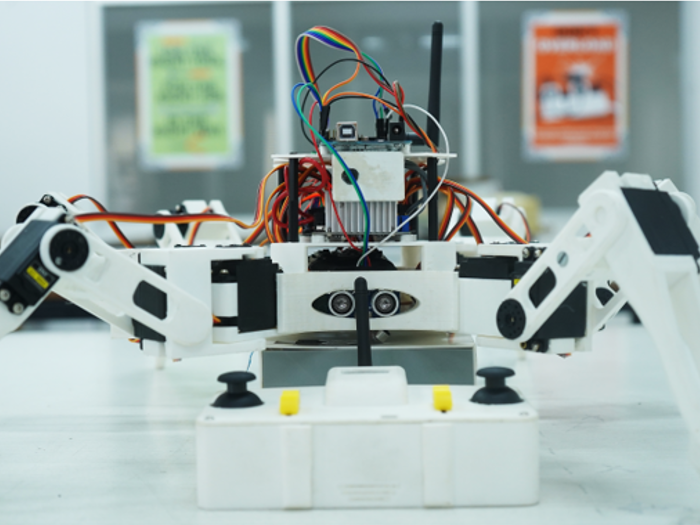
This paper presents a design of a hexapod robot as an educational tool to enhance STEM learning. Hexapod robots, known for their stability and efficiency in traversing uneven terrains, use inverse kinematics to plan precise movement trajectories. The study aims to provide students with hands-on experience in robotics, mathematics, and engineering concepts by constructing a […]
Robotic Arm Using Computer Vision

This project presents the design and implementation of a robotic arm integrated with computer vision, aiming to automate tasks such as sorting, picking, and placing objects based on colour. By leveraging advanced image processing and segmentation techniques, the system enhances precision and adaptability across various scenarios, offering applications in industries such as healthcare and automated gas stations. The robotic arm, developed using a systematic methodology, combines robust hardware with innovative software solutions such as OpenCV and MATLAB to deliver high accuracy and efficiency. This blend of technology underscores the transformative potential of robotics in enhancing productivity and addressing real-world challenges.