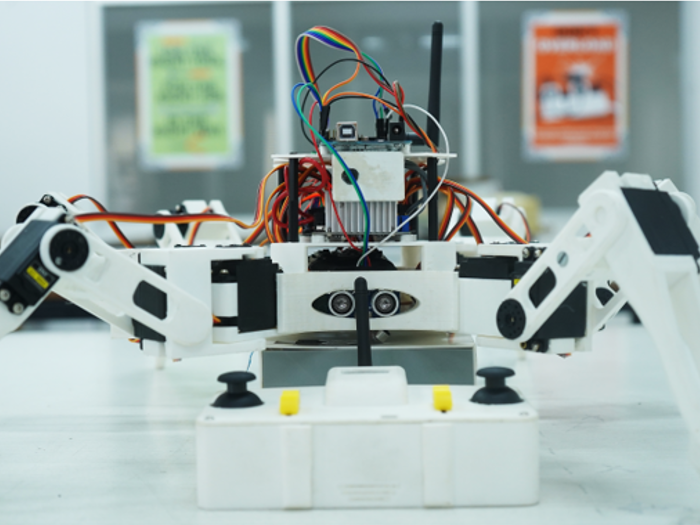
This paper presents a design of a hexapod robot as an educational tool to enhance STEM learning. Hexapod robots, known for their stability and efficiency in traversing uneven terrains, use inverse kinematics to plan precise movement trajectories. The study aims to provide students with hands-on experience in robotics, mathematics, and engineering concepts by constructing a hexapod robot with accessible assembly instructions and open-source code. Key features include gait coordination, trajectory planning using Bézier curves, and remote-control functionality. The robot’s design, based on insect leg anatomy, enables practical learning opportunities, promoting robotics education and bridging theoretical knowledge with real-world applications.